JL-RBT-ZH/E五子棋人机对战装置
发布时间:2019-12-11 17:20:06 浏览次数:240 次

设备简介
本系统是以控制软件为核心,以六自由度工业机器人及机器视觉为基础的智能下棋机器人系统。该机器人利用视觉识别及人工智能技术实现下棋。在下棋过程利用视觉系统采集信息,运用数据库分析软件制定最优算法,对机械臂实现位置执行控制,提高下棋精度。工业机器人的快捷性保证了下棋过程的感官享受,该作品致力于将五子棋机器人小型化及智能化,以嵌入式智能平台为支撑,灵活控制机械手臂,实现真正意义上的人机对弈,综合成本较低将使其适用于大众消费。
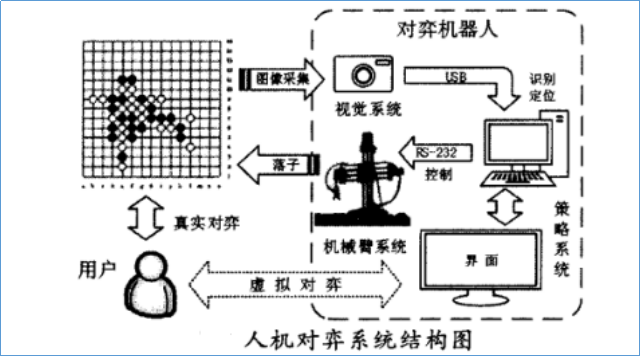
五子棋人机对弈系统主要包括视觉系统、策略系统和机器人系统三大功能模块。机器人通过摄像头实时捕捉棋子的位置变动,得到对手的出招,然后输入到五子棋算法中得到应招,之后通过控制机器人来完成棋子的定位和控制气缸完成吸放动作,从而实现了真正意义上的人机对弈。
视觉系统对棋盘进行图像采集,通过特定的图像识别算法对双方棋子进行识别与定位,得到当前的棋盘布局;策略系统对当前棋盘布局进行分析,调用智能对弈算法计算出最优落子位置坐标,换算成执行器的动作量并发送至机器人系统,由其完成取子、移动、落子等运动控制,从而在真实的棋盘上实现人机对弈。策略系统提供可视化的人机界面,能将视觉系统得到的棋盘布局图形化显现,实现对弈过程中界面与棋盘信息的同步。此外,用户亦可通过人机界面与策略系统进行纯软件的虚拟对弈,增强了趣味性,丰富了实验内容。
上一篇: 组合模块式机器人应用装置
相关新闻
- 李克强:建立奖惩并举机制激励各... 2019-04-29
- 行业发展历程 2019-04-29
- MES系统在质量管理中的应用与研究 2019-04-29